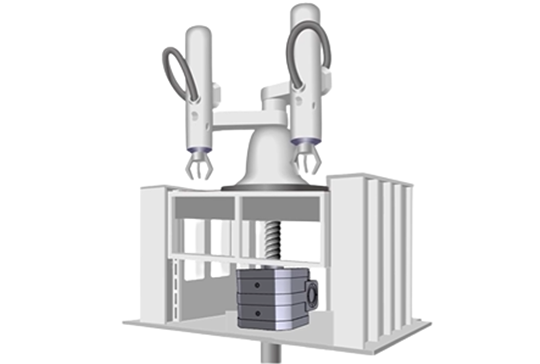
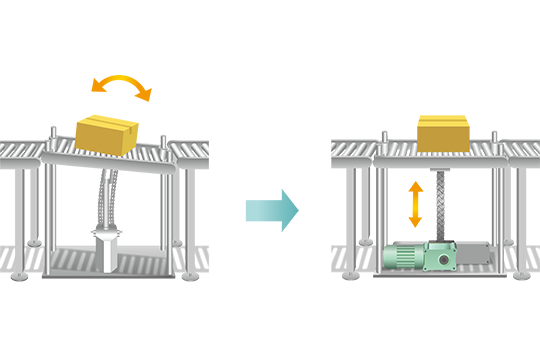
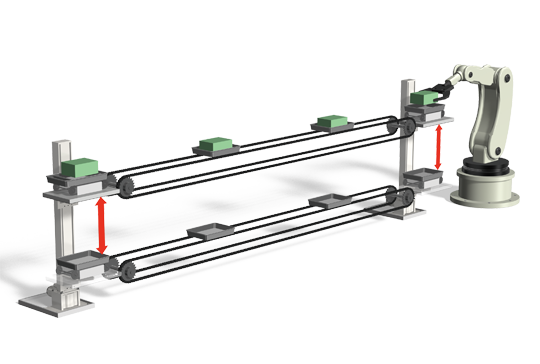
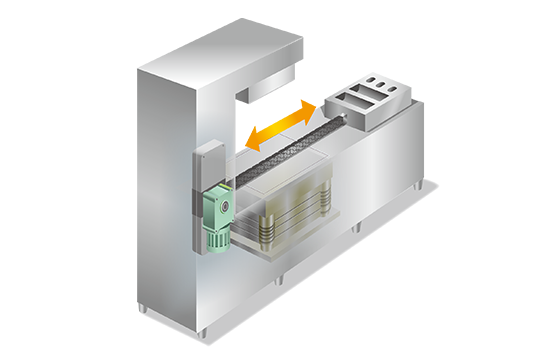
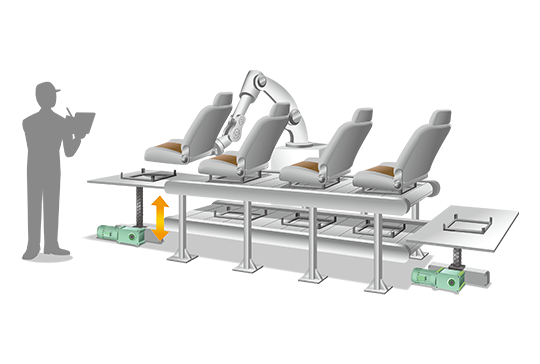
The SCARA robot is raised and lowered using Linispeed Jack, realizing an extension of the lifting stroke.
Linispeed Jack
overview
Linispeed Jack was adopted to complement the Z-axis movement of the SCARA robot. The lifting stroke, which was insufficient with the robot alone, is sufficiently secured by a low-profile structure that does not compromise the overall layout constraints of the system. Furthermore, by coordinating control with the robot using servo motor drive, high-speed and smooth vertical movement is achieved, contributing to a reduction in the overall cycle time of the transport operation.
Problem
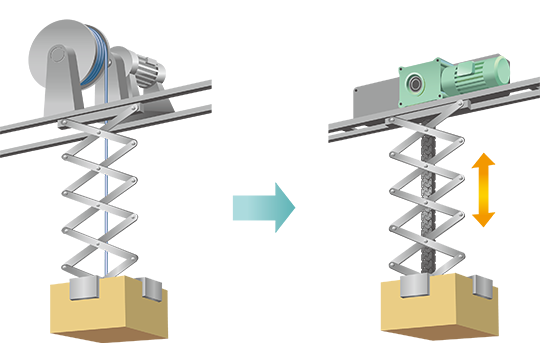
While some SCARA robots are equipped with a Z-axis movement mechanism, there are limitations to their lifting range, and in some processes, it may not be possible to secure the necessary stroke. Even when adding an external mechanism, conventional screw jacks presented challenges in terms of high speed, synchronization with the robot, and securing installation space.
Adopted products
Linispeed Jack

This is Ball screw lifting unit that can make the most of the performance of the servo motor.
Linispeed Jack achieves a maximum operating speed of 200 mm/s and a maximum Percentage duty cycle of 100% ED, enabling improved productivity of the equipment.
Even when operating at higher speeds, the jack is smaller than conventional jacks, and the newly developed structure allows for a low profile, contributing to more compact equipment.
Benefits of adopting the product
By adopting Linispeed Jack, we were able to secure a stroke exceeding the robot's Z-axis travel range, improving process adaptability. Furthermore, its low-profile structure allowed for integration without increasing the overall size of the equipment, achieving both increased layout flexibility and improved productivity.
Tsubaki will do its utmost to support you in solving any problems you may have.
Please feel free to contact us with any concerns you may have.
Click here for details on the adopted products
Click here for consultation
Solution Case Study in the same industry
-
The pallet lifting device eliminates hydraulic pressure and significantly reduces design and assembly man-hours.
 ProblemHigh speed and high frequency, Quit air/hydraulicIndustryothersPurposeMove linearlyproductLinear Actuator
ProblemHigh speed and high frequency, Quit air/hydraulicIndustryothersPurposeMove linearlyproductLinear Actuator -
Eliminate oil leaks and the risk of workplace accidents by removing hydraulic pressure from cable durability testing machines
 ProblemHigh speed and high frequency, Quit air/hydraulicIndustryothersPurposeMove linearlyproductLinear Actuator
ProblemHigh speed and high frequency, Quit air/hydraulicIndustryothersPurposeMove linearlyproductLinear Actuator -
The outdoor transmission section uses an environment-resistant Drive chain, achieving both rust resistance and high strength.
 ProblemMaintenance, lifespanIndustryothersPurposeTransmit powerproductDrive chain
ProblemMaintenance, lifespanIndustryothersPurposeTransmit powerproductDrive chain -
Waterproof and corrosion-resistant electric cylinders ensure stable operation even in wet environments
 ProblemQuit air/hydraulic, corrosion, water exposureIndustryothersPurposeMove linearlyproductLinear Actuator
ProblemQuit air/hydraulic, corrosion, water exposureIndustryothersPurposeMove linearlyproductLinear Actuator -
Resolves tooth skipping and gear damage in kiln chain rotation mechanisms
 ProblemSlippageIndustryothersPurposeRotate and decelerateproductPin gear drive
ProblemSlippageIndustryothersPurposeRotate and decelerateproductPin gear drive -
Solves the problem of slippage inherent in tire-friction-driven drum rotation
 ProblemSlippageIndustryothersPurposeRotate and decelerateproductPin gear drive
ProblemSlippageIndustryothersPurposeRotate and decelerateproductPin gear drive -
The drum rotation mechanism solves the problem of crushed powder clogging the mechanism.
 ProblemothersIndustryothersPurposeRotate and decelerateproductPin gear drive
ProblemothersIndustryothersPurposeRotate and decelerateproductPin gear drive -
Successfully improved tilt of the lift table by using a cantilever and reduced maintenance
 ProblemmaintenanceIndustryothersPurposeMove linearlyproductLinear Actuator
ProblemmaintenanceIndustryothersPurposeMove linearlyproductLinear Actuator
Solution Case Study for the same problem
-
Achieving low dust generation and space-saving automation at the same time with a lifting device in a clean environment
 ProblemSpace-saving, Wear debris and dust generationIndustryLCD, semiconductor, electronic equipment, communicationsPurposeMove linearlyproductLinear Actuator
ProblemSpace-saving, Wear debris and dust generationIndustryLCD, semiconductor, electronic equipment, communicationsPurposeMove linearlyproductLinear Actuator -
Space-saving lifter makes pallet circulation system compact
 ProblemSpace-savingIndustryAutomotive industryPurposeMove linearlyproductHigh-speed lifter
ProblemSpace-savingIndustryAutomotive industryPurposeMove linearlyproductHigh-speed lifter -
Space-saving equipment achieved by customizing the lifter's lifting jig shape
 ProblemSpace-savingIndustryLCD, semiconductor, electronic equipment, communicationsPurposeMove linearlyproductHigh-speed lifter
ProblemSpace-savingIndustryLCD, semiconductor, electronic equipment, communicationsPurposeMove linearlyproductHigh-speed lifter -
Achieves high lifting height, space saving, high speed and multi-point stopping, which were difficult with existing lifters
 ProblemSpace-saving, Long travel length, high speed and high frequencyIndustrySteel and non-ferrous metalsPurposeMove linearlyproductHigh-speed lifter
ProblemSpace-saving, Long travel length, high speed and high frequencyIndustrySteel and non-ferrous metalsPurposeMove linearlyproductHigh-speed lifter -
Adopted for the lifting mechanism of the ceiling transport conveyor, realizing high tact transport
 ProblemSpace-saving, high-speed and high-frequencyIndustryAutomotive industryPurposeMove linearlyproductLinear Actuator
ProblemSpace-saving, high-speed and high-frequencyIndustryAutomotive industryPurposeMove linearlyproductLinear Actuator -
The space required for the stroke of the cylinder is reduced, making the equipment more compact.
 ProblemSpace-savingIndustryMachine tools/molding machinesPurposeMove linearlyproductLinear Actuator
ProblemSpace-savingIndustryMachine tools/molding machinesPurposeMove linearlyproductLinear Actuator -
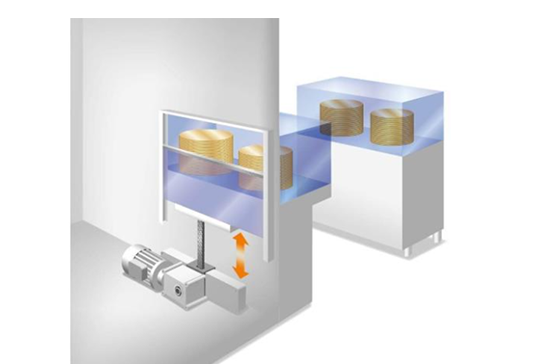
The ceiling unit takes up less space than the wire lift system
 ProblemSpace-savingIndustryFood/BeveragePurposeMove linearlyproductLinear Actuator
ProblemSpace-savingIndustryFood/BeveragePurposeMove linearlyproductLinear Actuator -
By lowering the floor of the lifter, we have succeeded in making the upper and lower two-tier conveyor more compact.
 ProblemSpace-savingIndustryAutomotive industryPurposeMove linearlyproductLinear Actuator
ProblemSpace-savingIndustryAutomotive industryPurposeMove linearlyproductLinear Actuator