- The robot's performance cannot be maximized.
(MAX load/speed)
|
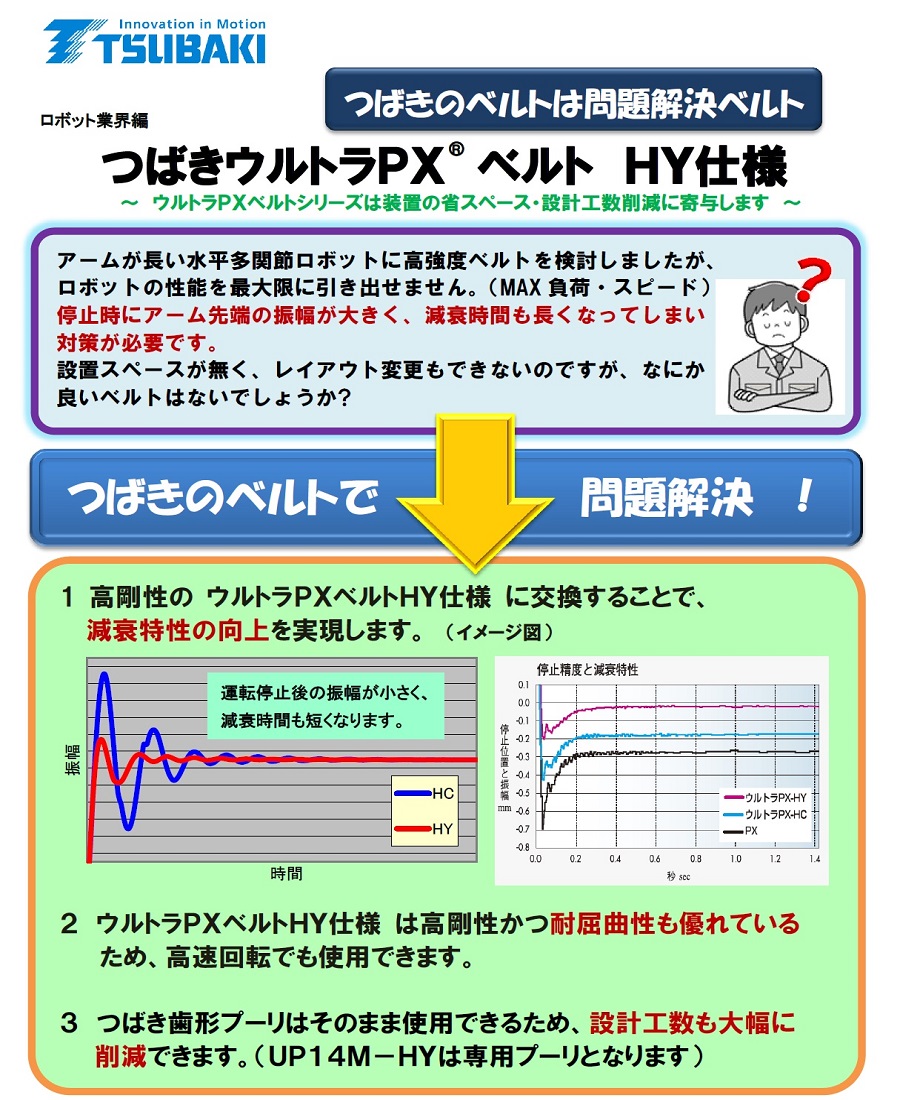
- ・High rigidity improves damping characteristics
|
- Improved robot arm stopping accuracy
|
- When stopped, the amplitude of the arm tip is large,
Long decay time
|
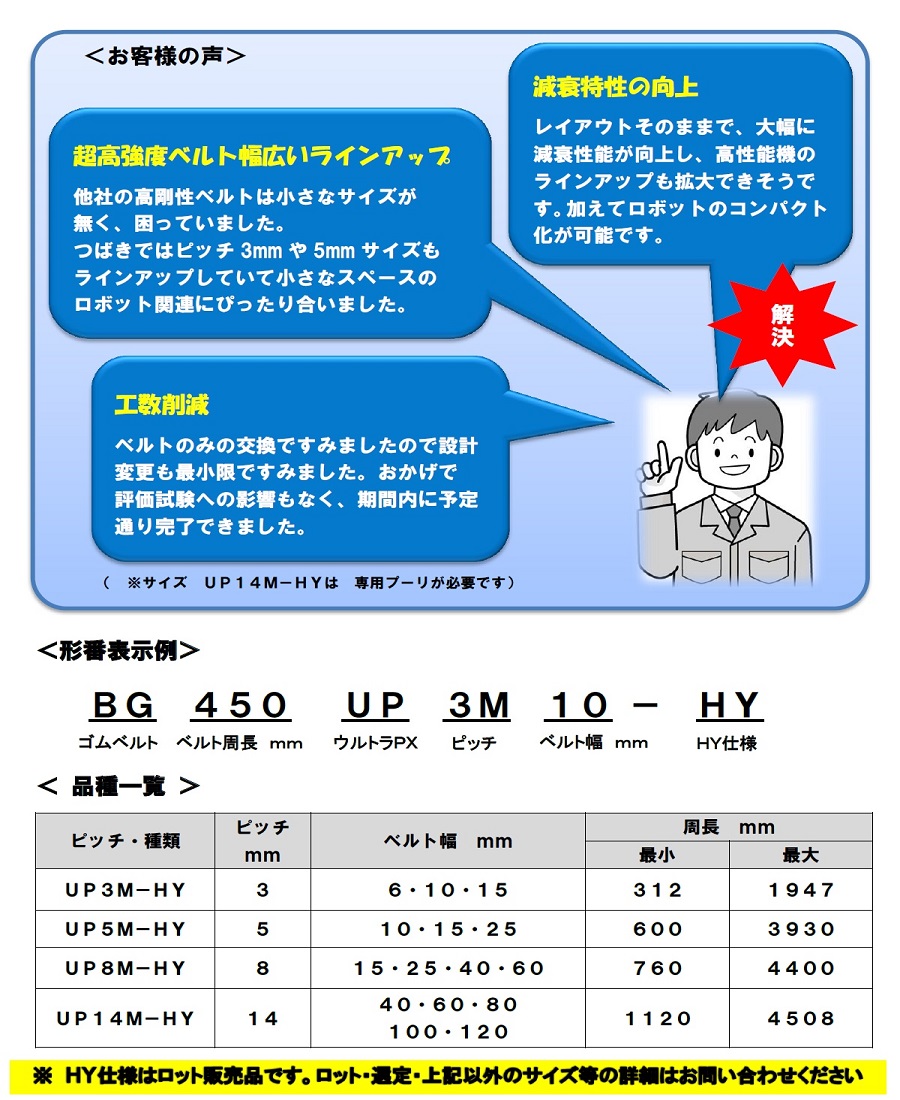
- -Excellent bending resistance, can be used even at high speeds
|
- Space-saving and high-speed operation possible
|
- There is no installation space,
You can't change the layout
|
- ・Current pulleys can be used
(UP14M-HY requires a special pulley)
|
- Belt replacement only
A lineup of sizes not available from other companies
|